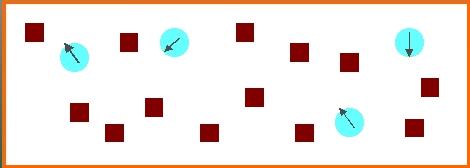
Su una superficie piana è distribuita una colonia di didabot,
robot analoghi ai Kephera, ciascuno dei quali utilizza 2
sensori IR anteriori per evitare collisioni frontali.
Sulla stessa superficie si trovano un certo numero di
ostacoli. Il comportamento emergente della colonia è
quello di produrre una o più cataste di detti ostacoli.