|
Laboratory of System Dynamics
|
Activity of the Laboratory - Experimental analysis of dynamical systems
and control.
Year of fundation - 1995.
Scope of the Laboratory - Education and research.
Director - Franco Blanchini.
Supervisor - Dr Stefano Miani.
Special support -
Eurotech - Amaro (UD), Italy.
Thanks (for his precious help) to Mr Dario Fonda, Udine.
Equipment presently available (self-made)
- Two-tanks hydraulic system
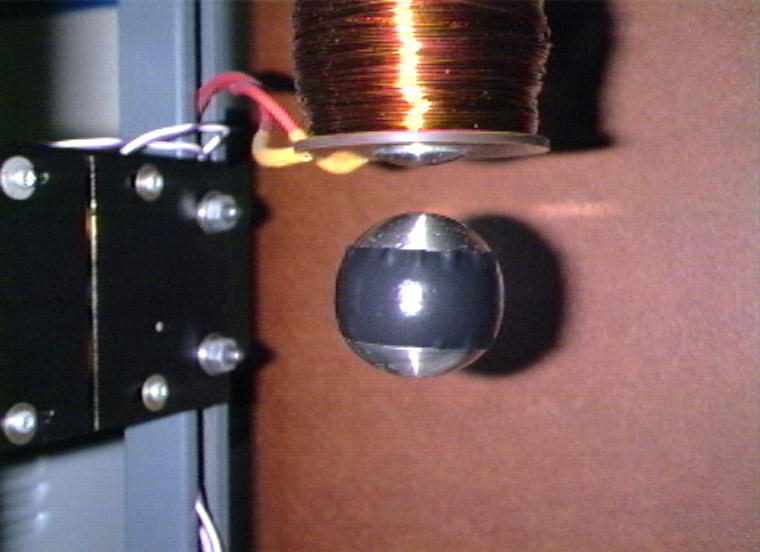
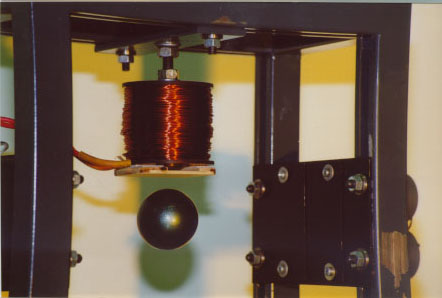
- Magnetic levitation system
- Automatic pointer system
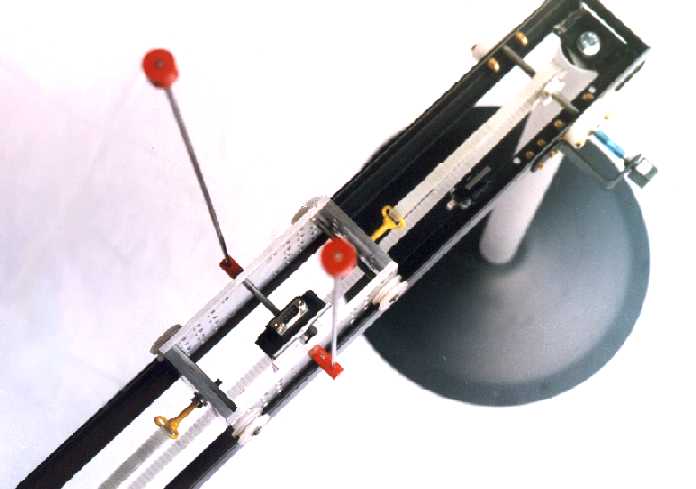
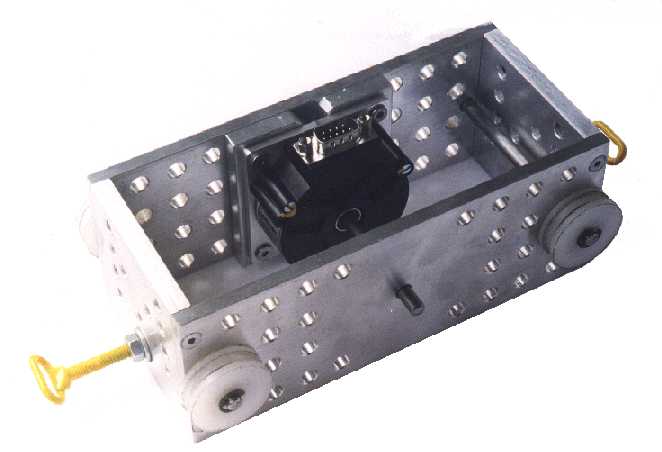
- Cart-pendulum system
- Obscillating flywheel system
- Control software
Software
- Generation of polyhedral Lyapunov functions for robust control
- Optimization of dynamic distribution networks
- Dynamic simulation of multy-inventory systems
Students who have been involved
- Dr. Stefano Miani (Supervisor).
- Maria Gariup (Optimization of dynamic distribution networks - 1995)
.
- Giorgio Tommasella (Simulation of multy-inventory systems - 1995).
- Gianluca Koruza (Realization of the two-tank system - 1996).
- Luca Tubaro (Control of the two-tank system - 1996)
- Marco Piasenzotto (Control optimization of the two-tank system - 19
96)
- Fabio Cussigh (Realization and control of the magnetic magnetic levi
tation system - 1996)
- Aleandro Agarinis (Control optimization of the magnetic levitation s
ystem - 1997)
- Lorenzo Schiava (Realization of the infrared ray pointing system - 1
998)
- Fabrizio Taboga (Interface for the control of the magnetic levitator
- 1998)
- Matteo Nardone (Realization of the controlled cart-pendulum system -
1999)
- Venier Daniele (Control of the cart-pendulum system - 2000)
- Felice Andrea Pellegrino (Neural Network Control - 2000)
- Michele Franzoso (Adaptive Control of the levitator - 2001)
- Carlo Savorgnan (Software for computing invariant sets - 2003)
- Venturini Ivan (Relization of the vibrating system) - 2003)
- Giovanni Totis (Control of the vibrating system) - 2003)
| | | |

Hydraulic system with two tanks and pump
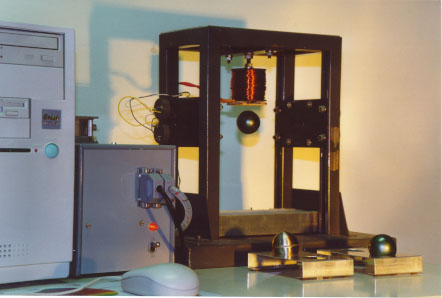
Magnetic levitation system - Photo 1

Cart-pendulum system
Cart-pendulum system
Obstacle-avoiding robot control
Cartesian Robot Control with obstacle avoidance
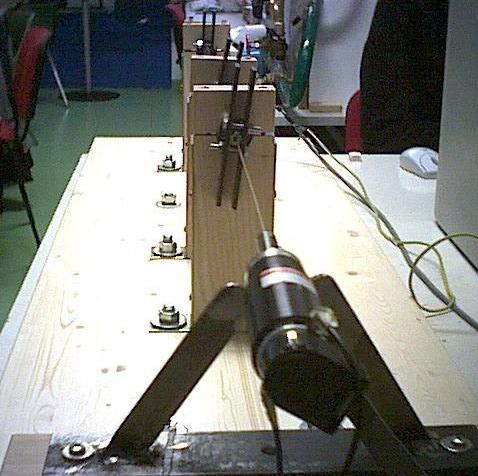
Obscillating flywheel system
Relatively Optimal Control: experimental results
Transients with state and estimated-state feedback and non-nominal initial state
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}