La robotica è una disciplina con un carattere fortemente interdisciplinare nel quale si coniugano, con egual peso, sia l'aspetto ingegneristico e informatico che quello etologico e biologico, senza trascurare la psicologia cognitiva e le neuroscienze. Gli studi pioneristici, condotti da Brooks nei laboratori del M.I.T. nella seconda metà degli anni 80', hanno permesso di rifondare la robotica autonoma recuperando nozioni fondamentali come la corporeità e l'essere situato, indispensabili nella definizione stessa di controllo reattivo, come si vedrà più avanti.
Lo stesso paradigma applicato al caso multirobot autonomi con soluzioni architetturali non necessariamente omogenee, permette di sviluppare meccanismi di controllo in robotica collettiva, basati sulla comunicazione implicita di tipo stigmergico, analogamente a quanto accade nei sistemi biologici. La coordinazione implicita del gruppo di robot per il conseguimento di un obiettivo comune si basa, in questo caso, sul riconoscimento e rafforzamento di pattern che ciascun individuo del gruppo rileva monitorando l'ambiente.
Su questa linea guida, che ripercorre le indagini etologiche del mondo animale, si colloca la rinuncia ad una rappresentazione simbolica, tanto cara all'approccio basato sulla conoscenza dell'Intelligenza Artificiale, verso un utilizzo pressocchè diretto dell'informazione sensoriale per pilotare gli attuatori.
Naturalmente è necessario rivedere alcuni concetti fondamentali che costituiscono lo schema implementativo del controllo di un robot autonomo i quali, pur ereditando molte proprietà tipiche della programmazione strutturata, richiedono di rivisitare gli aspetti di interazione con il mondo esterno, volutamente trascurati nell'approccio tradizionale della programmazione.
L'idea di disporre di creature completamente asservite alle necessità umane affonda le sue radici nel lontano passato ma solo recentemente si è realizzata nei modi e nelle forme a noi familiari. Come era già accaduto in passato, la finzione letteraria è stata la prima a delineare i tratti salienti di queste creature, presentate come un ibrido inestricabile fra meccanico e biologico, quasi a voler essere un improbabile anello mancante dell'evoluzione di sofisticati e complessi assemblaggi meccanici, dalla parvenza umana, in veri e propri umanoidi dalla caratteristiche quasi biologiche.
Più il confine fra scienza e fantascienza diventa incerto, più le nostre definizioni di robot sono deboli. Quand'è che una macchina può dirsi un robot? E quando questo diventa un androide o un cyborg? La risposta procede di pari passo a quella che, sul versante delle scienze cognitive, si chiede: quanto deve progredire l'Intelligenza Artificiale per cessare di essere artificiale?
Sebbene gli antichi progenitori dei robot si possano far risalire a vecchi automi come la macchina a vapore o la Macchina Universale di Turing, resta il fatto che soltanto alla fine degli anni '50 e all'inizio degli anni '60 fanno la comparsa i primi robot moderni. Possiamo considerare Joe Engelberger come padre della robotica per aver creato quello che probabilmente può definirsi il primo robot industriale, l'Unimate.
In effetti l'ingresso dei robot nel mondo degli esseri umani avviene in modo tumultuoso con macchine per la produzione industriale, che affiancano l'uomo in quella che verrà successivamente definita la fabbrica automatica. In questa prospettiva, l'Associazione per la Robotica Industriale (RIA) dà la seguente definizione.
"Un robot è un manipolatore multi-funzionale riprogrammabile progettato per spostare materiali, componenti, utensili o dispositivi specializzati attraverso movimenti variabili programmati per l'esecuzione di una varietà di compiti."
La definizione proposta è di per se molto restrittiva perchè esclude, fra l'altro, i robot mobili, ossia tutte quelle macchine evolute che stanno alla base dello sviluppo della robotica autonoma. Infatti, all'estremo opposto, si colloca la robotica come realizzazione cinestetica dell'intelligenza o, se vogliamo, l'applicazione della psicomotricità agli automi.
"La robotica è la connessione intelligente fra percezione ed
azione."
(Brady)
Inizia così il primo passo di un lungo cammino verso la realizzazione di robot evoluti, dotati cioè di autonomia e capacità di assolvere compiti complessi, che vede procedere su binari paralleli l'evoluzione tecnologica e scientifica della Robotica e dell'Intelligenza Artificiale. Non sarà così per sempre perchè alla fine degli anni '80 la Robotica tornerà alle sue origini cibernetiche abbandonando il filone funzionalista, così importante per discipline applicate che ripongono nella mente il loro studio e le loro attenzioni come accade per l'Intelligenza Artificiale.
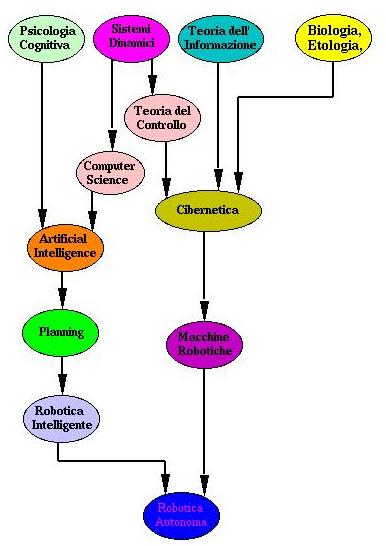
Norbert Wiener è universalmente accreditato, verso la fine degli anni '40, come il fondatore della cibernetica: un ibrido fra teoria del controllo, scienza dell'informazione e biologia con l'obiettivo di spiegare i principi comuni del controllo e della comunicazione sia negli animali che nelle macchine.
Wiener continuò a sviluppare questo suo punto di vista degli organismi come macchine, utilizzando il principio della retroazione nel tentativo di ottenere uno sviluppo matematico dei sistemi caratterizzati dal forte accoppiamento bidirezionale con l'ambiente ed esprimere, in questo modo, i comportamenti naturali. Si affermava, pertanto, già allora la nozione di situatedness, ossia di sistema situato nell'ambiente, che tanto peso avrebbe avuto negli sviluppi più recenti della robotica. Il forte accoppiamento bidirezionale di un organismo col proprio ambiente è ripreso dall'etologia.
W. Grey Walter (1953) applicò questi principi nella creazione della Macchina Speculatrice (Machina Speculatrix), precursore delle macchine robotiche e che fu successivamente trasformata in hardware come Tartaruga di Walter (Grey Walter's Tortoise).
Oggi, la cibernetica si presenta come un approccio interdisciplinare all'organizzazione dei sistemi, indipendentemente dalla loro realizzazione fisica. Mentre nella teoria generale dei sistemi si guarda agli organismi viventi come un tutto (holismo) focalizzando l'attenzione sulle caratteristiche strutturali, comportamentali e di sviluppo, la cibernetica predilige la prospettiva epistemologica che vede
"il sistema nel suo insieme analizzabile in termini dei suoi componenti e della loro organizzazione al suo interno, senza perdere informazione su di esso".
Pertanto, il ruolo della cibernetica nella robotica autonoma attuale non va interpretato come paradigma diretto nella definizione e realizzazzione delle architetture di controllo dei moderni robot mobili ma, piuttosto, come schema di principio che fornisce la base epistemologica di tutte quelle idee innovative che, nel corso dell'ultimo decennio, hanno permesso l'effettiva realizzazione di tali macchine. Si tratta, in effetti, di un ruolo cerniera che stabilisce i necessari nessi fra lo sviluppo delle scienze biologiche e le scienze cognitive per quelle applicazioni che trovano nella robotica il loro naturale terreno di sperimentazione.
Lo schema proposto nel seguito da conto, in prima approssimazione, dello sviluppo di ambiti di ricerca e applicativi apparentemente distanti fra loro consentendo, in tempi più recenti, la realizzazione di macchine robotiche di grande impatto sociale e produttivo.
Gli aspetti coinvolti sono assai numerosi e riguardano sia la struttura fisica del robot che il suo sistema di controllo. Il fatto che la richiesta di realizzazioni robotiche si spinga sempre di più verso macchine simili ad organismi biologici si traduce in una maggiore consapevolezza del funzionamento di tali organismi e come riprodurne i comportamenti rilevanti con gli strumenti propri della "computer science".