L'immagine del robot, trasmessa dalla letteratura fantastica, è quella di una macchina pensante, volutamente resa goffa nel ragionare e nell'esprimersi quanto nel muoversi e nell'autodeterminarsi. Con questa scelta si è voluto delineare, fin dall'inizio, un tipo di intelligenza che Gardner chiama spaziale e corporeo-cinestetica, piuttosto che linguistica e logico-matematica secondo il punto di vista più tradizionale.
Dunque, l'idea di robot è più vicina alla tradizione cibernetica, che ha il pregio di accomunare sistemi viventi e artificiali nel tentativo di spiegare il loro funzionamento in termini di feedback e omeostasi, rispetto ad una fuorviante e pragmaticamente inutile quintessenza di "Macchina Intelligente" tanto cara alle Scienze Cognitive.
Piuttosto che cercare di capire se un comportamento si possa considerare
intelligente o meno, ci si può porre la domanda: in che modo si
verifica un certo comportamento?
Dare una risposta convincente a questa domanda per un gran numero di
comportamenti significa anche aver migliorato la nostra comprensione sui
meccanismi sottostanti l'intelligenza. Naturalmente bisogna definire
esattamente cosa s'intende per "risposta convincente".
Ciò che si considera intelligente dipende anche, ma non solo, dalle nostre aspettative e questo spiega perchè non esiste un giudizio unanime su che cosa debba intendersi per intelligenza. Alcune definizioni a riguardo, riportate di seguito, sono un esempio illuminante.
Come si può notare si passa dall'abilità nell'uso del pensiero astratto ai meccanismi più squisitamente biologici e, sebbene l'ambiente non venga sempre menzionato in modo esplicito, ciò non toglie che tutte le definizioni citate portino con sè l'idea di novità nell'adattamento.
Nonostante il paradigma più in voga dagli anni '50 agli anni '80 sia stato quello degli agenti intelligenti che ha cercato di applicare direttamente alla robotica i principi dell'intelligenza artificiale, le prime macchine robotiche sono state costruite come sistemi analogici. Un esempio per tutti è la Tartaruga di Walter, che sarà brevemente discussa nella sezione seguente e dalla quale appare chiaramente come sia possibile ottenere comportamenti complessi, analoghi a certi comportamenti intelligenti mostrati dai sistemi viventi, con un paradigma di controllo relativamente semplice e non convenzionale.
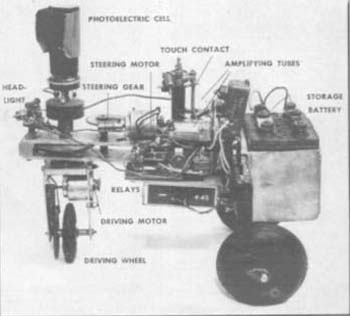
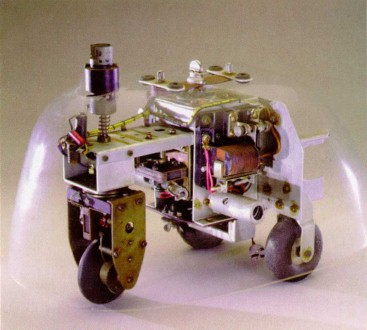
Come si è detto, W. Grey Walter (1953) applicò le idee della cibernetica nella creazione della Macchina Speculatrice (Machina Speculatrix), precursore delle macchine robotiche e che fu successivamente trasformata in hardware come Tartaruga di Walter (Grey Walter's Tortoise). La sua realizzazione si basa su alcuni principi costruttivi molto interessanti:
La tartaruga, il cui controllo era effettuato mediante un dispositivo completamente analogico (si veda la figura), consisteva di due sensori, due attuatori e due cellule nervose (tubi termoionici). Una fotocellula direzionale per riconoscere la luce e un sensore di contatto fornivano il richiesto feedback ambientale. Lo schema è quello che appare nella figura seguente
Un motore comandava l'unica ruota motrice sterzante anteriore mentre un secondo motore forniva la necessaria forza motrice di locomozione. La fotocellula puntava sempre nella direzione della ruota motrice per rilevare luce dall'ambiente.
La tartaruga esibiva i seguenti comportamenti:
I comportamenti, sono selezionati in ordine di priorità dalla più alta alla più bassa: evitamento d'ostacoli, moto da/verso la luce, ricerca della luce.
 |
 |
I veicoli di Breitenberg riprendono, trent'anni più avanti, il filone aperto da Walter avvantaggiandosi del punto di vista psicologico. In questo caso i principi di comportamento dei circuiti analogici vengono estesi ad una serie di esperimenti comportamentali che coinvolgono un insieme di veicoli. Tali sistemi fanno uso di influenze inibitorie ed eccitatorie, accoppiando direttamente sensori ed attuatori.
Sebbene la lezione della cibernetica, indicando nell'omeostasi e nella retroazione gli schemi base del controllo dei robot, ne suggerisca l'implementazionee diretta in termini di circuiti analogici, oggi, grazie alla diffusione della microelettronica, si preferisce l'impiego di circuiti digitali nei quali il controllo viene programmato mediante opportuni linguaggi allo scopo.
Dunque, per quanto riguarda il controllo dei robot, si tratta di vedere come un paradigma di programmazione sia più o meno adeguato a realizzare le funzionalità del robot in relazione agli obiettivi che deve perseguire e all'ambiente in cui tali obiettivi sono determinati.
Infatti, contrariamente al caso degli elaboratori elettronici, non esiste un robot universale in grado di portare a termine un compito assegnato in un qualunque ambiente di lavoro. Dunque, obiettivo della robotica è anche quello di stabilire i metodi più generali possibili che permettano ad un programmatore di realizzare il controllo di un robot.
A questo proposito si possono identificare tre paradigmi distinti, ciascuno dei quali presenta proprie specificità e si basa su profonde assunzioni epistemologiche sul significato di intelligenza e di comportamento.
Dallo schema generale degli elaboratori, dovuto a von Neumann, deriva per adattamento lo schema SENSE-PLAN-ACT di un riobot a controllo gerarchico.
Per ridurre l'impatto dei tempi di computazione del planner si può introdurre un meccanismo di dead-reckoning per migliorare il tempo medio di risposta. Tuttavia, la soluzione ottimale richiede un accoppiamento diretto sensori-attuatori con l'impiego di un modulo specifico che deve essere necessariamente un automa a stati finiti (FSA), cosicchè il tempo di reazione può essere limitato superiormente.
Il punto di svolta dei paradigmi della robotica autonoma può vedersi nel passaggio dal concetto base di azione, tipico dei sistemi di pianificazione dell'Intelligenza Artificiale, al concetto più generale di comportamento (behaviour), definito come
"un insieme di azioni, ciascuna delle quali associata ad uno schema percettivo (riflesso), tali da caratterizzare, nel loro complesso, un metodo per conseguire un obiettivo oppure mantenere attivo uno scopo."
Si vede, allora, che questa definizione di comportamento è applicabile sia ai sistemi artificiali (robot autonomi) che agli organismi biologici (etologia) e contiene un riferimento implicito alla proprietà di situatedness dell'agente (d'ora in poi potendo essere sia naturale che artificiale) con un occhio di riguardo al meccanismo di feedback che, eventualmente, l'ambiente induce sull'agente stesso.