

In
accordo con la descrizione della ricerca proposta, l'Unità di
Siena ha prodotto i seguenti risultati scientifici.
-
Stimatori subottimi per l'identificazione set-membership di modelli
di ordine ridotto.
In questo contesto è stato
analizzato il problema della progettazione ottima dell'ingresso ai
fini dell'identificazione nel caso in cui il sistema in esame sia
dotato di sensori di tipo binario [1] o multisoglia [2]. Tale
problema è stato formulato in un contesto worst case. I
risultati ottenuti consistono nella determinazione di un upper bound
migliore di quelli presenti in letteratura e nella progettazione di
un ingresso subottimo per l'identificazione di sistemi FIR di ordine
generico.
In [3] e [4] viene studiato il problema della
costruzione del modello di incertezza ottimo in norma l1 contenente
un insieme finito di modelli assegnati. Questo problema è
stato formulato come un problema di centro di Chebyshev condizionato,
ed è stato proposto un algoritmo che converge alla soluzione
in un numero finito di passi. Tale algoritmo risulta
computazionalmente efficiente anche per problemi ad elevata
dimensionalità.
- Identificazione di modelli
nonlineari mediante approssimazioni lineari a tratti
Si è proseguito lungo la linea di ricerca iniziata in [5] e riguardante il problema di identificare un sistema non lineare a tempo discreto composto da sottosistemi lineari e nonlineari interconnessi. Nei lavori [6,7] sono state discusse le assunzioni minimali sotto le quali il problema di identificazione considerato può essere risolto, e nel contempo l’approccio proposto in [5] è stato generalizzato a una classe di sistemi interconnessi più ampia. Le prestazioni dell’algoritmo di identificazione sono state dimostrate in esempi in cui il sistema non lineare vero non appartiene alla classe dei modelli lineari a tratti. Una panoramica delle tecniche di identificazione di modelli lineari a tratti e' fornita nel lavoro di survey [8]. E' stato realizzato un toolbox in Matlab, denominato PWAID [9], che implementa due tecniche di identificazione di modelli lineari a tratti.
Il problema della realizzazione ingresso-uscita di modelli lineari a tratti è stato affrontato in [10,11] nel caso di modelli con switching determinato da una partizione poliedrale dello spazio di stato, e in [12] nel caso di modelli con switching arbitrario. In tutti i casi sono state fornite condizioni necessarie e sufficienti per l'esistenza di una rappresentazione ingresso-uscita equivalente a un modello in forma di spazio di stato. Nel caso in cui una rappresentazione ingresso-uscita equivalente esista, è stata presentata una procedura costruttiva per determinare i parametri sia delle dinamiche lineari che del meccanismo di switching.
-
Progetto di controllori robusti di complessita' ridotta.
Nel
lavoro [13] è stato considerato il problema della
massimizzazione del margine di stabilita' parametrico l_2 di sistemi
di controllo con controllore di ordine e struttura fissata. Viene
fornito un lower bound convesso per il margine di stabilita' in
oggetto. Questo permette la sua ottimizzazione mediante tecniche
standard di ottimizzazione convessa di tipo LMI.
-
Criteri di analisi e sintesi basati sulla passivita' per sistemi a
dati campionati ed ibridi
Nel lavoro [14] sono stati
sviluppati alcuni criteri per analizzare la passivita' di sistemi a
tempo discreto affini a tratti (PWA) e polinomiali a tratti (PWP)
basati su funzioni di storage quadratiche e polinomiali a tratti e su
opportuni rilassamenti. Per sistemi affini a tratti viene inoltre
considerato il progetto di leggi di controllo passivizzanti in
retroazione dallo stato.
- Tecniche di ottimizzazione
e rilassamenti convessi per l’analisi della stabilita' e delle
prestazioni robuste per sistemi incerti
Il lavoro [15] studia
la stabilita' robusta di sistemi lineari in spazio di stato con
incertezze tempo varianti con tasso di variazione limitato. Il
contributo principale consiste nell'introduzione di una nuova classe
di funzioni di Lyapunov dipendenti dai parametri, in cui la
dipendenza sia dai parametri incerti che dalle variabili di stato è
espressa come forma polinomiale omogenea. In questo contesto viene
fornita una condizione sufficiente per la stabilità robusta,
sotto forma di una LMI. Il lavoro [16] fornisce una visione
unificante di alcuni metodi di rilassamento convesso per la soluzione
di problemi di controllo robusto. In [17] sono state studiate diverse
classi di rilassamenti convessi per problemi di robustezza di
sistemi di controllo in presenza di incertezze strutturate. In
particolare, è stata studiata l’equivalenza di alcuni
rilassamenti convessi che vengono spesso usati nella letteratura sul
controllo robusto.
Il lavoro [18] riguarda l’analisi di stabilità L_2 per modelli hinging hyperplane autoregressivi con ingressi esogeni (HHARX). L’approccio proposto si basa su una rappresentazione equivalente del modello HHARX sotto forma lineare frazionaria con un blocco diagonale statico di nonlinearità di settore ripetute. Questa rappresentazione consente di applicare risultati di analisi per sistemi con nonlinearità ripetute basate sull’uso degli Integral Quadratic Constraints (IQC). La condizione sufficiente di stabilità L_2 risultante può essere verificata per mezzo di una LMI.
APPLICAZIONI A PROBLEMATICHE REALI
-
Sviluppo di laboratori remoti per l'identificazione ed il controllo
di sistemi complessi
(http://act.dii.unisi.it)
In
[19] e' stata proposta una soluzione che consente di incrementare
l'efficienza e l'affidabilità di un laboratorio remoto,
mediante l'utilizzo di un CD/DVD di boot. Questa soluzione, che in
linea di principio può essere applicata a qualunque
laboratorio remoto, oltre a ridurre i tempi di configurazione per la
messa in linea di un nuovo processo, garantisce una maggiore
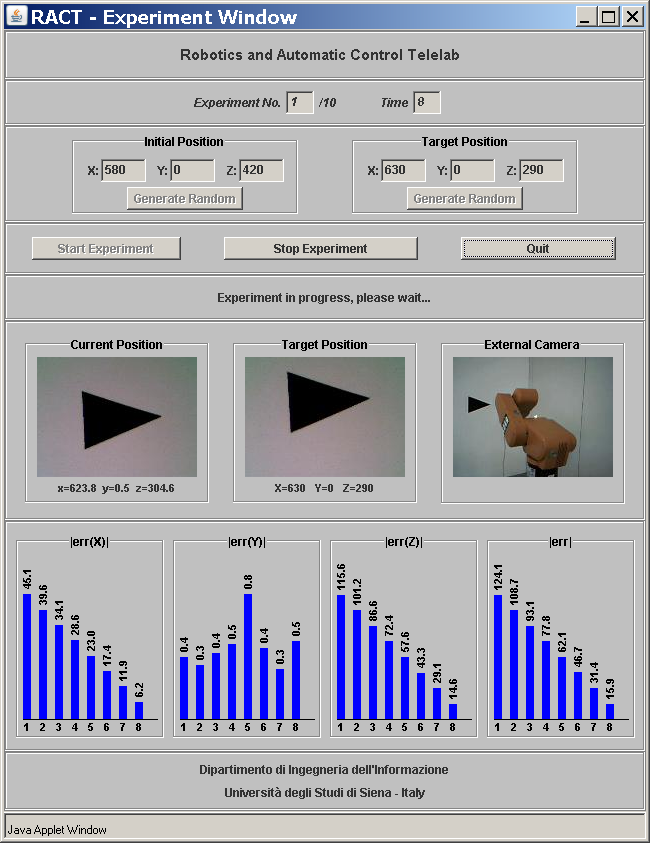
stabilità all'intero sistema. In [20] viene descritta una
nuova funzionalità di un laboratorio remoto, che permette di
poter effettuare esperimenti con finalità sia didattiche che
di ricerca su manipolatori robotici. L'aspetto innovativo consiste
nel poter utilizzare questo strumento oltre che per esperimenti di
base (es. cinematica inversa) anche per esperimenti avanzati di
visual servoing
(in figura alcune schermate tipiche del telelaboratorio remoto).
- Identificazione e
simulazione di ecosistemi
In questo ambito si è
affrontato il problema della identificazione di modelli dinamici
delle crisi anossiche (scarsa ossigenazione delle acque) e della
qualità dell’acqua in ecosistemi lagunari, attraverso
l’utilizzo di tecniche di identificazione e di analisi di dati
reali temporali e spaziali.
Per quanto riguarda l’analisi dei dati riguardanti la dinamica temporale si sono utilizzate tecniche di ricostruzione dello spazio degli stati e analisi basate su Recurrence Plots e Generalized Recurrence Plots. Sono state individuate oscillazioni caotiche, periodiche (durante le crisi) e fasi di transizione laminare nel passaggio da stati eutrofici/ipertrofici a condizioni di anossia ([21,22]).
Dal punto di vista modellistico, invece, sono stati studiati modelli di reazione e diffusione, descritti da equazioni differenziali alle derivate parziali di tipo parabolico, lineari e non lineari. In questo contesto sono stati risolti appositi problemi inversi allo scopo di stimare i parametri dei modelli in grado di simulare e predire correttamente i dati misurati. Tale studio è stato applicato ai grandi laghi della regione Amazzonica anche in funzione della geometria dei bacini che presentano frontiere estremamente frastagliate con dimensione non intera (vedi figura) ([23-26]).
- Laboratorio per i sistemi complessi (CSLab)
Nel corso del progetto e’ stato realizzato un laboratorio sperimentale per lo studio dei sistemi complessi, che, attualmente, comprende le seguenti attività ed esperimenti:
Studio del fenomeno quantistico denominato Intrappolamento Coerente di Popolazione (Coherent Population Trapping, CPT). A tale scopo è stato costruito un magnetometro altamente stabile e sensibile in grado di misurare su tempi lunghi, in modo autonomo ed automatizzato, il campo magnetico terrestre e le sue variazioni. Lo stesso apparato potrà essere impiegato per analizzare gli effetti prodotti sulle risonanze CPT da campi magnetici dipendenti dal tempo, e, in particolare, analizzare il fenomeno di CPT in sistemi modulati inquadrando il problema in termini di oscillatori parametrici.
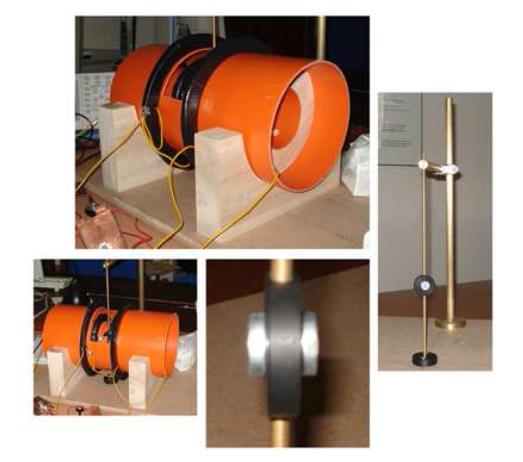
In presenza di forze non autonome (come ad esempio campi magnetici esterni) anche un semplice sistema meccanico come il pendolo semplice diventa paradigmatico per lo studio dei sistemi caotici. In tale contesto, i sistemi magnetomeccanici rappresentano una importante risorsa per l’osservazione della comparsa di dinamiche caotiche tramite una cascata di biforcazioni, un fenomeno molto raro e molto difficile da realizzare e da controllare per via della intrinseca instabilità dei sistemi caotici. Nel corso del progetto è stato realizzato un pendolo magnetico costituito da un dipolo magnetico immerso in un campo magnetodinamico. Il suddetto apparato, mostrato in figura, è stato inoltre corredato di schede di acquisizione dati, permettendo lo sviluppo e l’applicazione di tecniche di identificazione e controllo di sistemi non lineari che mostrano dinamiche complesse.
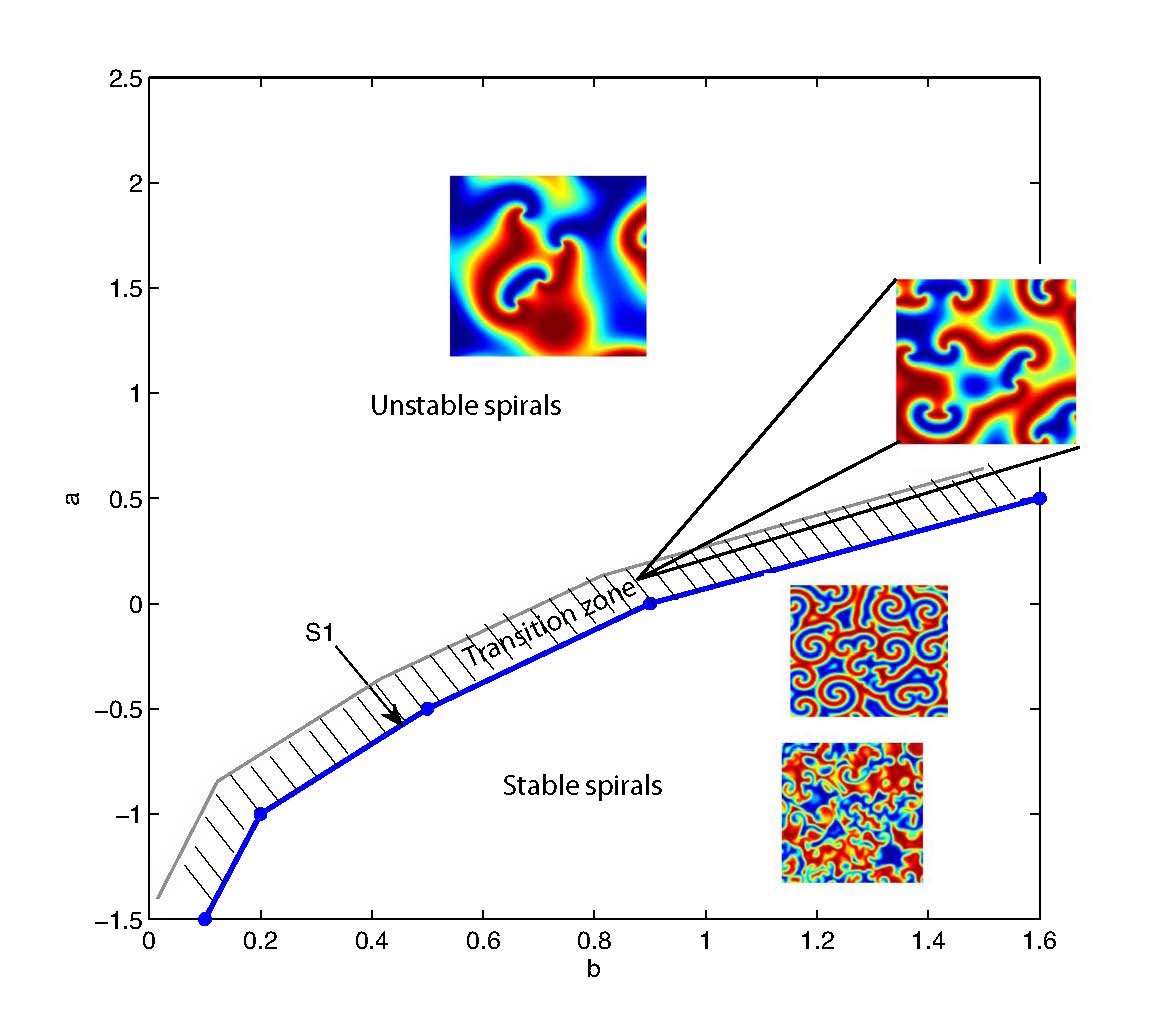
Gli esperimenti realizzati presso il laboratorio hanno previsto inoltre l’applicazione di tecniche di ricostruzione dello spazio degli stati di sistemi dinamici spazio-temporali tramite Recurrence Plots per la loro caratterizzazione attraverso indicatori di complessità. Alcuni di questi indicatori, quali ad esempio entropia e determinismo, hanno permesso di rilevare strutture ricorrenti a diverse scale spaziali e dunque di misurare il livello di complessità dei pattern spaziali mostrati dai sistemi. L’analisi e’ stata applicata a sistemi quali, ad esempio, sistemi reazione-diffusione, reazioni chimiche oscillanti, distribuzione della clorofilla negli oceani, ecc. Più recentemente si e’ provveduto ad applicare tale analisi all’equazione complessa di Ginzburg-Landau, per la simulazione di dinamiche turbolente. Ciò ha permesso di identificare una curva di biforcazione in funzione di alcuni parametri caratteristici del sistema che separa le regioni in cui si osservano spirali stabili da quelle instabili. Alcuni dei pattern analizzati e la suddetta curva di biforcazione sono riportati nella figura seguente. ([27,28]).
- Stabilità dei
sistemi di interazione uomo-macchina
In [29] viene
affrontato lo studio della stabilita' di sistemi di interazione
aptica multi-contatto e multi-utente. Tale studio e' basato su
tecniche di passivita' e su tecniche di ottimizzazione convessa LMI.
Viene inoltre proposto un metodo per la sintesi di controllori
(virtual coupling) decentralizzati stabilizzanti ed un criterio per
la valutazione dell'impatto del controllore sul realismo
dell'interazione. Questi risultati vengono estesi in [30] a
configurazioni in cui i singoli operatori umani possono interagire
ciascuno con piu' dispositivi.
In [31] viene proposta la
parametrizzazione LMI di una classe di controllori stabilizzanti
strutturati per sistemi aptici, sulla base della quale possono essere
risolti, mediante tecniche di ottimizzazione convessa, problemi di
prestazione quali la trasparenza del controllore rispetto
all'ambiente virtuale.
- Controllo robusto per il visual
servoing
Nel lavoro [32] è stato proposto un nuovo
algoritmo di asservimento visivo basato sulla geometria epipolare
costruita a partire dai profili degli oggetti di riferimento. I
contorni apparenti degli oggetti nel piano immagine sono usati per
stimare la posizione degli epipoli, da cui dipende la legge di
controllo che permette di guidare il robot mobile fino alla posizione
desiderata. Nel lavoro [33] viene affrontato un importante problema
di asservimento visivo per manipolatori robotici a 6 gradi di libertà
. In particolare, vengono fornite condizioni sotto cui esiste una
traiettoria rettilinea nello spazio euclideo che permetta di
raggiungere la posizione desiderata, preservando tutti gli oggetti di
riferimento nel campo visivo.
PUBBLICAZIONI
[1]
M. Casini, A. Garulli, A. Vicino, "Time Complexity and Input
Design in Worst-Case Identification Using Binary Sensors", Proc.
46th IEEE Conf. on Decision and Control, pp. 5528-5533, New Orleans,
LA, USA, Dec., 2007.
[2] M. Casini, A. Garulli, A. Vicino, "Optimal Input Design for Identification of Systems with Quantized Measurements", Proc. 47th IEEE Conf. on Decision and Control, pp. 5506-5512, Cancun, Mexico, Dec., 2008.
[3]
M. Casini, A. Garulli, A. Vicino, "An efficient algorithm for
the construction of l1 uncertainty model sets", Proc. of the
European Control Conference (ECC'07), pp. 2721-2727, Kos, Greece,
July, 2007.
[4] M. Casini, A. Garulli, A. Vicino, "Efficient
computation of l1 uncertainty sets", Automatica, vol.44, no. 10,
pp. 2570-2576, 2008.
[5] E. Pepona, S. Paoletti, A. Garulli,
P. Date, "An iterative procedure for piecewise affine
identification of nonlinear interconnected systems." Proc. of
46th IEEE Conference on Decision and Control, New Orleans, USA, pp.
5098-5103, 2007.
[6] E. Pepona, S. Paoletti, A. Garulli, P. Date, “Piecewise affine identification of nonlinear interconnected systems.” Automatica. Sottomesso, 2008.
[7] S.
Paoletti, A. Garulli, E. Pepona, P. Date, “Exploiting structure in
piecewise affine identification of LFT systems.” 15th IFAC
Symposium on System Identification. Sottomesso, 2008.
[8]
S. Paoletti, A. Lj. Juloski, G. Ferrari-Trecate, R. Vidal,
"Identification of hybrid systems: a tutorial." European
Journal of Control, vol. 13, no. 2-3, pp. 242-260, 2007.
[9]
S. Paoletti, J. Roll, "PWAID - Piecewise affine system
identification toolbox." Available at
http://www.rt.isy.liu.se/~roll/PWAID/.
[10] S. Paoletti, J.
Roll, A. Garulli, A. Vicino, "Input-output realization of
piecewise affine state space models." Proc. of 46th IEEE
Conference on Decision and Control, New Orleans, USA, pp. 3164-3169,
2007.
[11] S.
Paoletti, J. Roll, A. Garulli, A. Vicino, "Equivalence of
piecewise affine models in state space and input-output form.",
Transactions on Automatic Control, to appear 2009.
[12]
S. Paoletti, A. Garulli, J. Roll, A. Vicino, “A necessary and
sufficient condition for input-output realization of switched affine
state space models.” Proc. of 47th
IEEE Conference on Decision and Control, Cancun, Mexico, 2008.
[13]
G. Bianchini, P. Falugi, A. Tesi, A.Vicino, ``A convex lower bound
for the l_2 parametric stability margin of linear control systems
with restricted complexity controllers'', IEEE Transactions on
Automatic Control, vol. 52, Issue 3, pp. 514-520, 2007
[14] A.
Bemporad, G. Bianchini, F. Brogi, ``Passivity analysis and
passification of discrete-time hybrid systems'', IEEE Transactions on
Automatic Control, vol. 53, Issue 4, pp.
1004-1009, 2008.
[15] G. Chesi, A.
Garulli, A. Tesi, and A. Vicino. Robust stability of
time-varying
polytopic systems via parameter-dependent homogeneous Lyapunov
functions, Automatica, 43(2): 309{316, 2007.
[16] A. Vicino
and A. Garulli, Convex relaxations for robust control
problems,
Proc. of the European Control Conference 2007, Kos (Greece), July
2007.
[17] A. Garulli, A. Masi, A. Vicino, Convex relaxations for quadratic distance problems", Proc. 47th IEEE Conference on Decision and Control, Cancun (Mex), pp. 5444-5449, 2008.
[18] G. Bianchini, S. Paoletti, A. Vicino, “L_2-stability of hinging hyperplane models via integral quadratric constraints.” Proc. of 47th IEEE Conference on Decision and Control, Cancun, Mexico, 2008.
[19]
M. Casini, D. Prattichizzo, A. Vicino, "Operating Remote
Laboratories Through a Bootable Device", IEEE Transactions on
Industrial Electronics, 54(6), pp. 3134-3140, 2007.
[20] M.
Casini, F. Chinello, D. Prattichizzo, A. Vicino, "RACT: a Remote
Lab for Robotics Experiments", Proc. 17th IFAC World Congress,
Seoul, South Korea, July, 2008.
[21] A. Facchini, C. Mocenni,
N. Marwan, A. Vicino, E. Tiezzi, "Application of the nonlinear
time series analysis methods to the Dissolved Oxygen measures
collected in the Orbetello Lagoon (ITALY)", Ecological
Modelling, vol. 203 n. 3-4, pp. 339-348 (2007)
[22] A. Facchini, C. Mocenni, E. Tiezzi, A. Vicino, "Nonlinear time series analysis of ecological data collected in the Lagoon of Orbetello, Italy", Ecosystem and Sustainable Development V - Advances in Ecological Sciences (WIT Press) pp. 597-603 (2007).
[23] C. Mocenni, E. Sparacino, "Modelling Water Quality Processes in an Amazonian Basin with Fractal Boundary", Proc. International Conference on Approximation Methods and Numerical Modelling in Environmental and Natural Resources, Granada (Spain), pp. 369-375 (2007).
[24] C. Mocenni, E. Sparacino, "Modelling and Simulation of the Water Quality Processes in Lakes with Rough Boundaries: Application to an Amazonian Basin", Proc. COMSOL CONFERENCE, Grenoble (France), pp. 157-162 (2007).
[25] C. Mocenni, E. Sparacino, A. Vicino and J. Zubelli, ``Mathematical Modelling and Parameter Estimation of the Serra da Mesa Basin'', Mathematical and Computer Modelling, Vol. 47, pp. 765-780, 2008.
[26] C. Mocenni and E. Sparacino, "Identification and Simulation of a Spatial Ecological Model in a Lake with Fractal Boundary", Mathematics and Computers in Simulation (accepted, 2008).
[27] C. Mocenni A. Facchini A. Vicino, "Generalized Recurrence Plots for the analysis of complex images", Second International Workshop on Recurrent Plots, Siena, September 10-12 (2007).
[28] A. Facchini, C. Mocenni, A. Vicino, "Generalized Recurrence Plots for the analysis of images from spatially distributed systems", Physica D (in press, 2008, published online).
[29]
G. Bianchini, M. Orlandesi, D. Prattichizzo, ''Analysis and design of
multi-contact haptic systems: an LMI approach'', Proc. of 46th
Conference on Decision and Control, New Orleans, LA, USA, 2007.
[30]
G. Bianchini, M. Orlandesi, D. Prattichizzo, ''Stability analysis and
design of multi-dimensional haptic systems'', Proc. of Haptic
Symposium 2008, Reno, NV, USA, 2008.
[31]
G. Bianchini, M. Orlandesi, D. Prattichizzo, ''An LMI framework for
analysis and design of multi-dimensional haptic systems'', Proc. of
47th Conference on Decision and Control, Cancun, Mexico, 2008.
[32]
G. Chesi, G.L. Mariottini, D. Prattichizzo and A. Vicino,
Epipole-based visual servoing for mobile robots, Advanced Robotics,
20(2), February 2006.
[33] G. Chesi and D. Prattichizzo and A.
Vicino, Straight line
path-planning in visual servoing, ASME
Journal of Dynamic Systems, Measurement and Control, Vol. 129, No. 4,
pp. 541-543, 2007.
ORGANIZZAZIONE
DI EVENTI
Simone Paoletti e' stato
co-organizzatore della sessione minitutorial "Identification of
hybrid systems" nell'ambito della European Control Conference,
Kos, Grecia, 2-5 luglio 2007. Egli e' inoltre tra i
proponenti di una sessione invitata al 15th IFAC Symposium on System
Identification dal titolo “Current trends in identification of
switched and piecewise affine systems”.
Nel corso del 2007 è
stato organizzato dal gruppo di ricerca proponente il `Second
InternationalWorkshop on Recurrence Plots'
(www.recurrence-plot.tk/ws.php), nell'ambito delle attività
del Centro per lo Studio dei Sistemi Complessi dell'Università
di Siena
(http://csc.unisi.it/) diretto dal responsabile
dell'unità di ricerca.
Il gruppo proponente ha partecipato
all'organizzazione della Conferenza `BIOMATH: Mathematical Methods
and Modeling of Biophysical Phenomena', IMPA, Istituto Nacional de
Matematica Pura e Aplicada, Rio de Janeiro, 26 Agosto- 1 Settembre
2007.
È stato avviato presso il Centro per lo Studio dei
Sistemi Complessi dell’Università di Siena diretto dal
Responsabile del presente progetto, il laboratorio CS-lab sui
sistemi complessi.
PARTECIPAZIONE
A CONFERENZE
I componenti del gruppo di ricerca
hanno partecipato alle seguenti conferenze:
1) 10th "Hybrid
Systems: Computation and Control" International Workshop (HSCC),
Pisa, Italia, 3-5 aprile 2007.
2) European Control Conference
(ECC), Kos, Grecia, 2-5 luglio 2007.
3) IEEE CDC 2007, New
Orleans, LA, USA, 12-14 Dicembre 2007.
4) 17th IFAC World Congress, Seoul, Corea del Sud, 6-11 Luglio 2008.
5) 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9-11 Dicembre 2008.